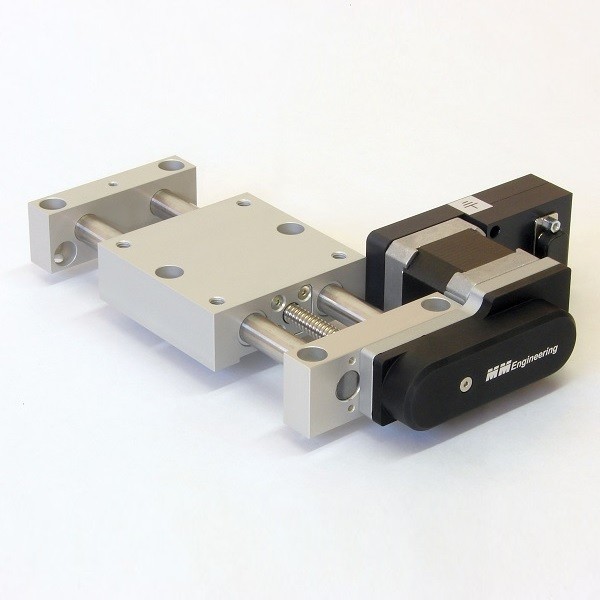
Motorpositioniertisch lang MPT7512
- Ab 5 Stück 5%
- Ab 10 Stück 9%

- Baugröße 12
- Führungsstangen Ø 12mm
- Hub 75mm (andere Längen möglich)
- Optional mit Schrittmotor oder Schrittmotor mit integrierter Positioniersteuerung

| Icon | Label | Typ | Größe | Download |
|---|---|---|---|---|

|
CAD (step) MPT7512 | zip | 12.5 MB | Download |
|
|
Programmiersoftware (exe) für Positioniersteuerung | zip | 7 MB | Download |

|
Flyer Positioniersystem motorisiert / Motorized Actuators | 2.9 MB | Download | |
|
|
Montageanleitung MPT V001 | 2.3 MB | Download |
Funktion
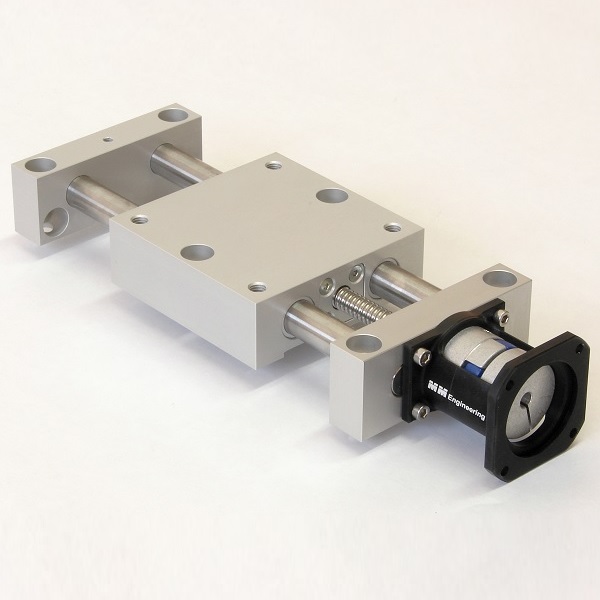
- Der Schlitten des Motorpositioniertisches wird mit Hilfe eines Motors und einer Spindel linear bewegt.
- Ein Standardschrittmotor (Nema17, □42mm) kann direkt axial angeflanscht werden oder seitlich über einen Zahnriementrieb montiert werden.
- Ein Schrittmotor mit Steuerung ist erhältlich.
- Die Spindelsteigung beträgt 2mm und die max. Eingangsdrehzahl 600 U/min.
Vorteile
Preiswert und robust
Dieser Motorpositioniertisch bietet eine preiswerte Lösung für Verstell- und Positionieraufgaben in Maschinen und Vorrichtungen.
Die hochgenauen langlebigen Gleitführungen sind schwingungsdämpfend und unempfindlich gegen Stöße und Umgebungseinflüsse.
Wartungsarm
Die Gleitbuchsen und Spindelmuttern eignen sich für den Trockenlauf.
Bei hohen Belastungen empfehlen wir eine Schmierung mit speziellem Kunststofffett (Klüber POLYLUB GLY 501).
Baukastensystem
Der Motorpositioniertisch MPT7512 kann unkompliziert sowohl mit den motorisierten als auch mit den manuell bedienbaren Verstelleinheiten der Größe 12 kombiniert werden.
Besonderes Feature

Flansch mit Klauenkupplung
Der Motorflansch ist geeignet für die direkte Montage eines Schrittmotors der Größe NEMA 17.
Die drehsteife Klauenkupplung sorgt für eine schwingungsdämpfende Drehmomentübertragung.

Zahnriemenantrieb variabel montierbar
Der seitliche Zahnriementrieb erlaubt die direkte Montage eines Schrittmotors der Größe NEMA 17.
Der Zahnriemenantrieb mit einer Übersetzung von 1:1 kann in 4 Positionen 4x90° montiert werden. So kann die Lineareinheit individuell entsprechend der Platzverhältnisse konfiguriert werden.


Schrittmotor
Der Schrittmotor bietet eine Auflösung von 1,8° / step und ein Haltemoment von 50 Ncm.
Der Spindeltrieb ist geeignet für Drehzahlen bis 600 1 / min.

Schrittmotor mit integrierter Positioniersteuerung
Der Schrittmotor bietet ein Haltemoment von 43 Ncm.
Die fest mit dem Motor verbundene Steuerungseinheit verfügt über einen Encoder, eine Steuerung mit Programmspeicher und eine Leistungsendstufe.
Der Spindeltrieb ist geeignet für Drehzahlen bis 600 1 / min.
Video
Kombinationsbeispiel
Motorpositioniertisch kurz MPT2408-AS-M-R-3
Vertikalhalter kurz MVH2408
Motorpositioniertisch lang MPT5008-AK-B
Montageplatte lang MMP5008
Motorpositioniertisch lang MPT5008-AK-B
Montageplatte lang MMP5008
Maße
Technische Daten
Belastbarkeit
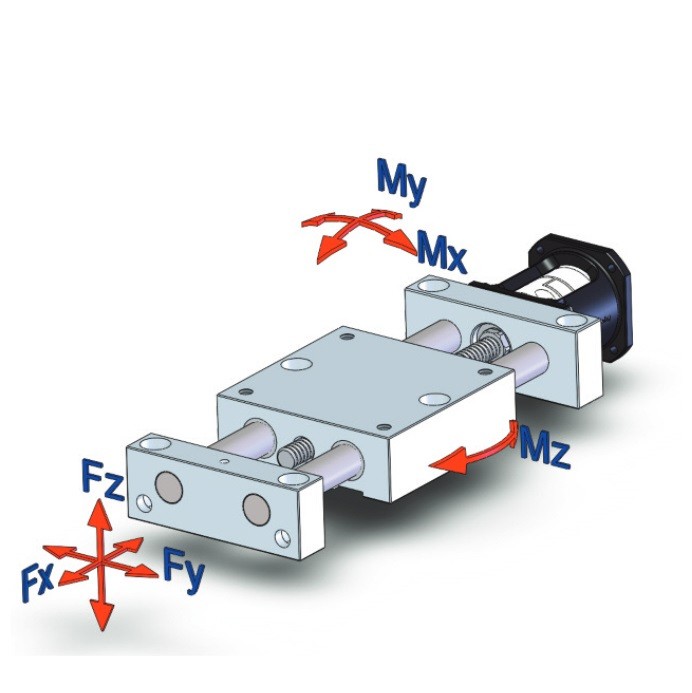
Fx: 60 N
Fy: 120 N
Fz: 100 N
Mx: 1 Nm
My: 1 Nm
Mz: 3 Nm
Präzision
Axialspiel: <0,04 mm
Radialspiel der Führung: <0,02 mm
Steigungsfehler der Spindel: ≤ 0,1mm / 300mm
Geschwindigkeit
Eingangsdrehzahl max.: 600 1/min
Verfahrgeschwindigkeit max.: 20 mm/s
Einschaltdauer max.: 100 %
Maße und Gewicht
Hub: 75 mm
Spindelsteigung: 2 mm
Einsatztemperatur: 10°C bis 60°C
Werkstoffe
RoHS konform
Lagerböcke und Schlitten: Aluminium eloxiert
Führungssäulen und Spindel: Stahl rostfrei, gehärtet
Gleitbuchsen und Spindelmutter: Spezial-Kunststoff
Kupplungsgehäuse: Kunststoff POM
Kupplung: Aluminium / Kunststoff
Motor Daten
Baugröße:
Strom pro Wicklung:
Rotorträgheitsmoment:
Induktivität pro Wicklung:
Haltemoment:
Widerstand pro Wicklung:
Auflösung:
Wert
NEMA 17 (42 mm x 42 mm)
1,8 A
82 gcm²
3,3 mH
50 Ncm
1,75 Ω
1,8° / step
Motor Kennlinie
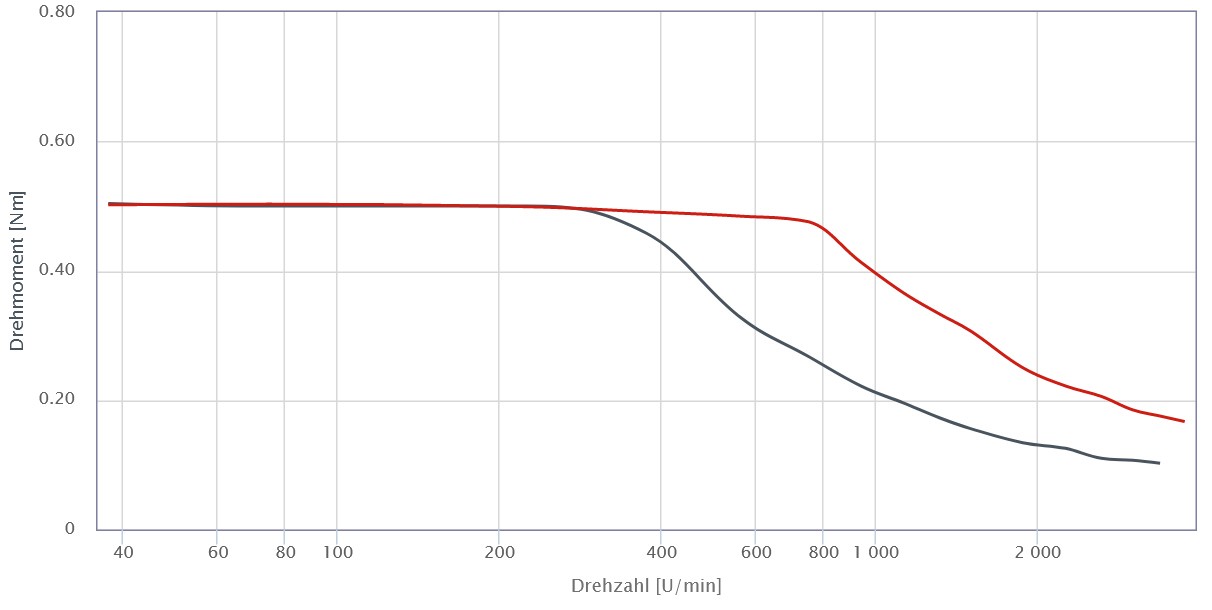
---- 1,8 A / 48 V / bipolar
---- 1,8 A / 24 V / bipolar
GSM17 Motor- / Steuerungsdaten
Steuerspannung:
Motorspannung:
Anschluss:
Schnittstelle:
Phasenstrom max.:
Haltemoment:
Stromabsenkung:
Eingänge:
Ausgänge:
Dyn. Umschaltung Schrittauflösung
Encoder:
Werte
+24 V bis +36 V DC
+24 V bis +48 V DC
Seriell TTL + TTL Umsetzer zu USB
Sub-D-Stecker 15pol HD
einstellbar bis 3 A
0,43 Nm
einstellbar
6 / +24 V bis +36 V DC
4 / +24 V DC
1/8 1/4 1/2 1/1
integriert zur Positionsüberwachung
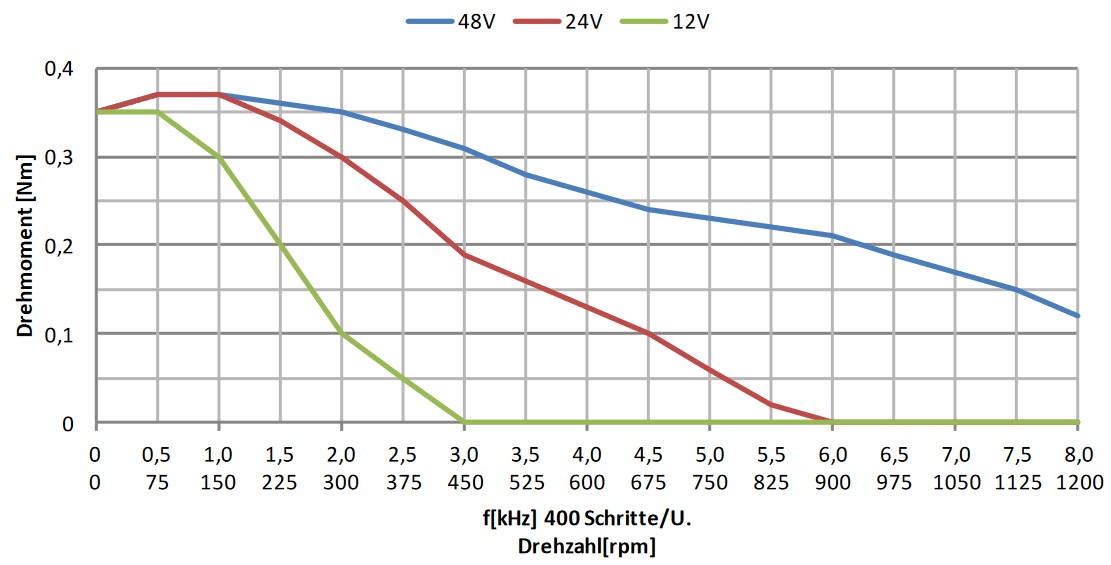
Bauform NEMA 17 mit Steuerung

Motor Kennlinie
Abmessungen und Gewicht


Bestellcode
MPT7512-AK-B
MPT = Motorpositioniertisch
75 = Hub 75 mm
12 = Baugröße 12 (Ø Führungssäulen)
AK = Antrieb koaxial
B = Ausführung Basis = ohne Motor
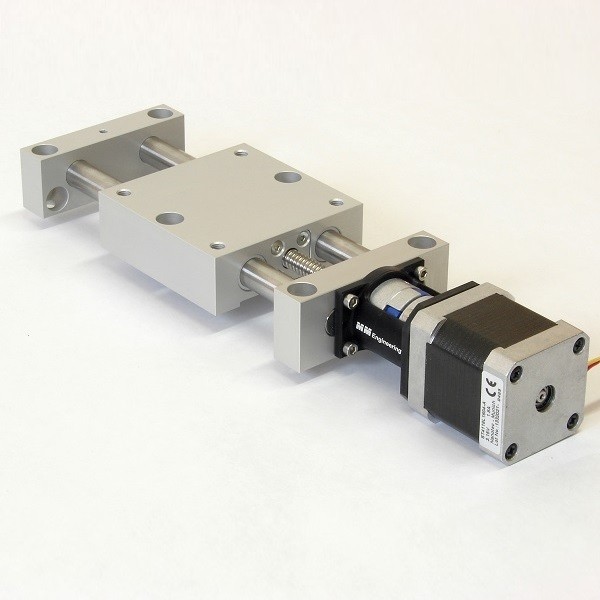
MPT7512-AK-M-1
MPT = Motorpositioniertisch
75 = Hub 75 mm
12 = Baugröße 12 (Ø Führungssäulen)
AK = Antrieb koaxial
M = mit Schrittmotor NEMA17
1 = Kabelausgangsorientierung 1
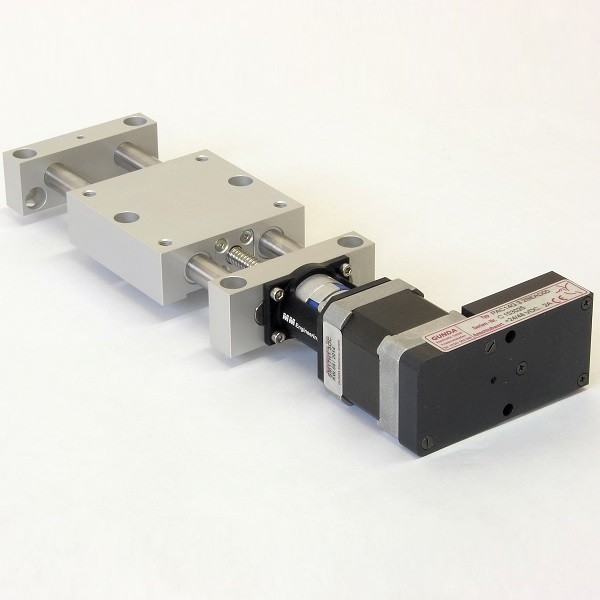
MPT7512-AK-S-1
MPT = Motorpositioniertisch
75 = Hub 75 mm
12 = Baugröße 12 (Ø Führungssäulen)
AK = Antrieb koaxial
S = mit Schrittmotor Nema 17 mit integr. Steuerung
1 = Steuerungsorientierung 1
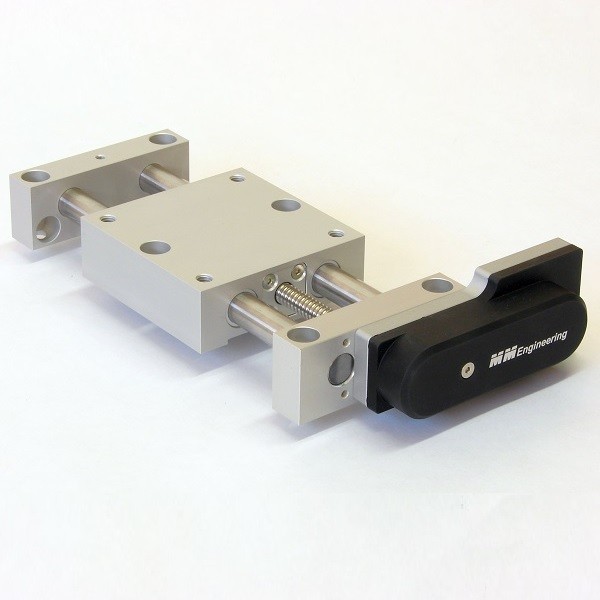
MPT7512-AS-B-R
MPT = Motorpositioniertisch
75 = Hub 75 mm
12 = Baugröße 12 (Ø Führungssäulen)
AS = Antrieb seitlich
B = Ausführung Basis = ohne Motor
R = Antriebsorientierung rechts
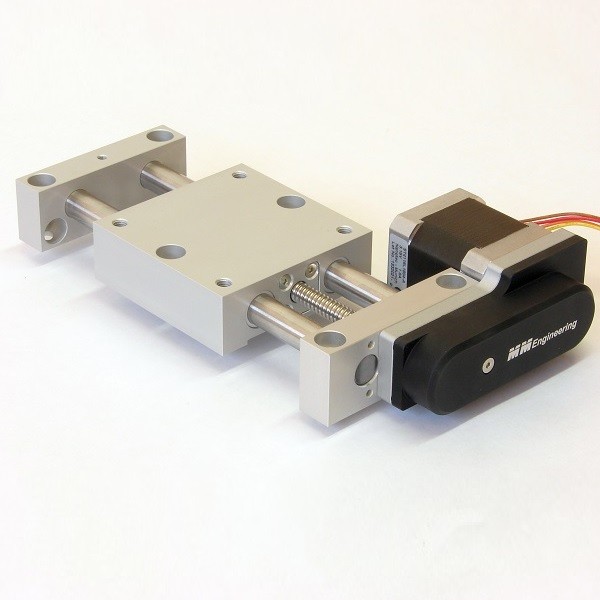
MPT7512-AS-M-R-2
MPT = Motorpositioniertisch
75 = Hub 75 mm
12 = Baugröße 12 (Ø Führungssäulen)
AS = Antrieb seitlich
M = mit Schrittmotor NEMA17
R = Antriebsorientierung rechts
2 = Kabelausgangsorientierung 2
MPT7512-AS-S-R-2
MPT = Motorpositioniertisch
75 = Hub 75 mm
12 = Baugröße 12 (Ø Führungssäulen)
AS = Antrieb seitlich
S = mit Schrittmotor NEMA17 mit integrierter Steuerung
R = Antriebsorientierung rechts
2 = Steuerungsorientierung 2













